Die Vermessung der Welt in Punkten: Eine Analyse der 3D-Digitalisierung und Punktwolkentechnologie
In einer Ära, in der die Grenzen zwischen physischer und digitaler Realität zunehmend verschwimmen, avanciert die 3D-Digitalisierung von einem Nischenwerkzeug zu einem strategischen Imperativ. Im Zentrum dieser Transformation steht die Punktwolke – eine ebenso simple wie tiefgreifende Datenstruktur, die das Potenzial hat, unser Verständnis und unsere Interaktion mit der Welt fundamental zu verändern. Dieser Beitrag beleuchtet auf akademischem Niveau die technologischen Grundlagen, den methodischen Workflow und die disruptiven Anwendungsmöglichkeiten von Punktwolken in Wissenschaft und Industrie.

1. Einleitung: Das Paradigma der Punktwolke
Die digitale Repräsentation dreidimensionaler Objekte und Umgebungen ist eine der fundamentalen Herausforderungen und zugleich eine der treibenden Kräfte in der modernen Informatik und Ingenieurwissenschaft. Während traditionelle CAD-Modelle auf geometrischen Primitiven (z.B. Linien, Kurven, Flächen) basieren, hat sich mit der Punktwolke (engl. Point Cloud) ein fundamental anderes Paradigma etabliert. Eine Punktwolke ist eine diskrete Menge von Datenpunkten in einem dreidimensionalen kartesischen Koordinatensystem, die in ihrer Gesamtheit die äußere Oberfläche eines Objekts oder einer Szene beschreiben [1].
Jeder Punkt wird durch seine X-, Y- und Z-Koordinaten definiert. Moderne Erfassungssysteme reichern diese geometrische Basisinformation um weitere Attribute an, wie z.B. RGB-Farbwerte, die dem Punkt eine fotorealistische Qualität verleihen, oder Intensitätswerte, die die Reflektivität des Lasersignals auf der Oberfläche beschreiben. Die Dichte der Punkte kann von wenigen hundert bis zu mehreren Milliarden variieren und bestimmt den Detailgrad der digitalen Replik. Diese rohe, unstrukturierte, aber hochpräzise Form der Datenerfassung bildet die Grundlage für eine Vielzahl von nachgelagerten Analyse- und Visualisierungsprozessen und hat sich als Schlüsseltechnologie für die vierte industrielle Revolution (Industrie 4.0) erwiesen.
2. Methodik der Datenerfassung: Von Photonen und Pixeln
Die Generierung von Punktwolken erfolgt durch eine Reihe von aktiven und passiven 3D-Scantechnologien. Die Wahl der Methode ist abhängig von der Applikation, dem zu erfassenden Objekt, der geforderten Genauigkeit und den Umgebungsbedingungen. Die zwei dominantesten Verfahren sind LiDAR und die Photogrammetrie.

2.1 LiDAR (Light Detection and Ranging)
LiDAR ist ein aktives Fernerkundungsverfahren, das auf der Aussendung von Laserpulsen und der Messung der Zeit basiert, die das Licht benötigt, um zum Sensor zurückzukehren (Time-of-Flight, ToF). Aus dieser Laufzeitdifferenz wird die exakte Distanz zum Objekt berechnet. Durch die schnelle Ablenkung des Laserstrahls mittels rotierender Spiegel können moderne terrestrische (TLS) oder flugzeuggestützte (ALS) LiDAR-Systeme bis zu zwei Millionen Punkte pro Sekunde erfassen [2].
Die Stärken von LiDAR liegen in der hohen Genauigkeit (im Millimeter- bis Zentimeterbereich), der Unabhängigkeit von den Lichtverhältnissen und der Fähigkeit, durch Vegetation zu „sehen", da der Laserstrahl mehrfach reflektiert werden kann (Multi-Echo-Fähigkeit). Dies macht LiDAR zur bevorzugten Methode für präzise topografische Vermessungen, die Bestandsdokumentation in der Architektur (As-Built-Modelle) und für die Umfelderfassung autonomer Fahrzeuge.
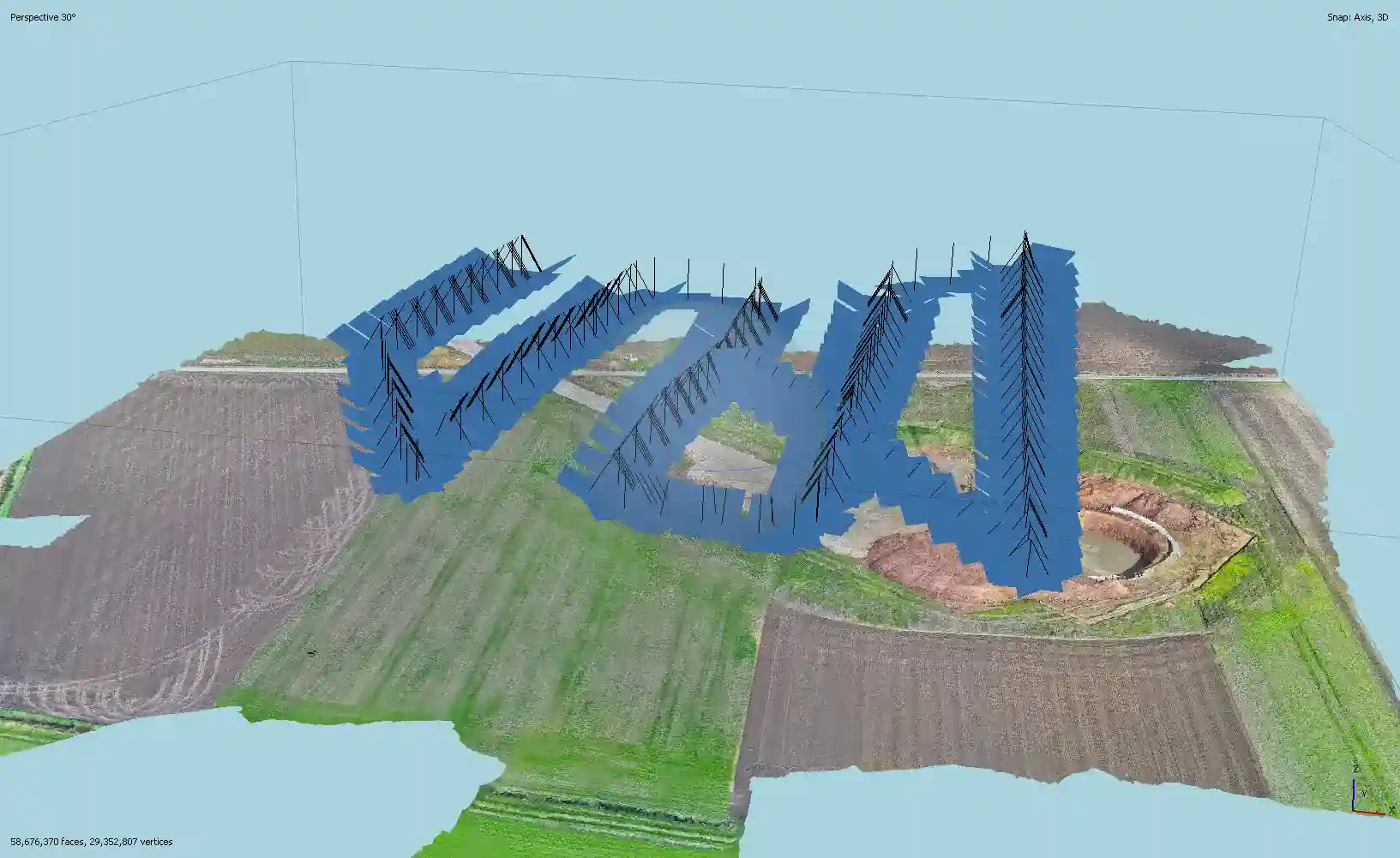
2.2 Photogrammetrie
Im Gegensatz zu LiDAR ist die Photogrammetrie ein passives Verfahren, das auf der Analyse von überlappenden digitalen Fotografien basiert. Mittels komplexer Algorithmen wie Structure from Motion (SfM) und Multi-View Stereo (MVS) werden korrespondierende Punkte in den Bildern identifiziert und deren 3D-Positionen durch Triangulation berechnet [3].
Der entscheidende Vorteil der Photogrammetrie liegt in der Erfassung von hochauflösenden Farbinformationen (Texturen), die zu fotorealistischen 3D-Modellen führen. Die Kosten für die Ausrüstung (hochwertige Kameras, oft auf Drohnen montiert) sind in der Regel geringer als für professionelle LiDAR-Systeme. Allerdings ist die Methode stark von guten Lichtverhältnissen abhängig und erreicht bei homogenen, texturarmen Oberflächen ihre Grenzen. Die Genauigkeit ist typischerweise geringer als bei LiDAR, kann aber für viele Anwendungen, wie z.B. in der Archäologie, im Kulturerbe oder in der visuellen Inspektion, ausreichend sein.
2.3 Weitere Technologien
Neben diesen beiden Hauptverfahren existieren weitere Technologien wie das Streifenlicht- oder Strukturiertes-Licht-Scannen, das durch die Projektion bekannter Muster eine hohe Genauigkeit bei der Erfassung kleinerer Objekte in kontrollierten Umgebungen ermöglicht, sowie Time-of-Flight-Kameras, die eine Echtzeit-Tiefenwahrnehmung für Anwendungen in der Robotik und Gestensteuerung liefern.
3. Der Verarbeitungsworkflow: Vom Chaos zur Ordnung
Die rohe Punktwolke ist zunächst eine unstrukturierte und oft fehlerbehaftete Ansammlung von Daten. Um sie in ein nutzbares digitales Asset zu überführen, ist ein mehrstufiger Verarbeitungsworkflow notwendig, der spezialisierte Software und erhebliches Know-how erfordert.
- Registrierung (Alignment): Da große Objekte selten von einem einzigen Standpunkt aus vollständig erfasst werden können, müssen mehrere Einzelscans zu einer kohärenten Gesamtpunktwolke zusammengefügt werden. Dieser Prozess, die Registrierung, erfolgt durch die Identifizierung von übereinstimmenden geometrischen Merkmalen oder künstlichen Passmarken in den überlappenden Bereichen der Scans.
- Filterung und Bereinigung: Rohe Punktwolken enthalten systematisches und zufälliges Rauschen sowie Ausreißer, die durch Messfehler, atmosphärische Störungen oder unerwünschte Objekte (z.B. bewegte Personen) entstehen. Statistische und algorithmische Filter (z.B. Statistical Outlier Removal) werden angewendet, um diese Artefakte zu eliminieren und die Datenqualität zu verbessern.
- Segmentierung und Klassifizierung: Dies ist einer der entscheidendsten Schritte. Hier wird die Punktwolke in sinnvolle, semantische Segmente unterteilt. Dies kann auf Basis geometrischer Eigenschaften (z.B. Ebenen, Zylinder) oder durch die Zuweisung von Objektklassen (z.B. „Boden", „Gebäude", „Vegetation") geschehen. Während einfache Segmentierungen automatisiert erfolgen können, erfordert eine detaillierte Klassifizierung oft manuelle Arbeit oder, zunehmend, den Einsatz von Deep-Learning-Algorithmen.
- Modellierung und Meshing: Für viele Anwendungen, insbesondere im CAD- und Visualisierungsbereich, wird die Punktwolke in ein Polygonnetz (Mesh) umgewandelt. Dabei werden die einzelnen Punkte zu Dreiecken oder anderen Polygonen verbunden, um eine geschlossene Oberfläche zu erzeugen. Alternativ können aus der Punktwolke auch direkt parametrische CAD-Modelle (z.B. für Rohrleitungen, Stahlträger) abgeleitet werden, ein Prozess, der als Scan-to-BIM (Building Information Modeling) oder Scan-to-CAD bekannt ist.
4. Anwendungsfelder: Die Disruption der Realitätserfassung
Die Fähigkeit, die physische Welt mit hoher Präzision digital zu erfassen, hat in einer Vielzahl von Branchen zu disruptiven Veränderungen geführt.

- Architektur, Ingenieur- und Bauwesen (AEC): Punktwolken ermöglichen eine präzise Bestandsdokumentation für Umbauten und Sanierungen, eine kontinuierliche Baufortschrittskontrolle (Soll-Ist-Vergleich) und eine verbesserte Qualitätskontrolle.
- Industrie und Fertigung: In der Qualitätskontrolle werden gefertigte Teile mit ihrem digitalen Zwilling (CAD-Modell) verglichen, um kleinste Abweichungen zu identifizieren. Im Anlagenbau ermöglichen Punktwolken die Planung von Umbauten ohne Produktionsstillstand (Brownfield-Planung).
- Geowissenschaften und Umweltmonitoring: Großflächige LiDAR-Scans aus der Luft werden zur Erstellung hochpräziser digitaler Geländemodelle (DGM), zur Überwachung von Gletschern, zur Analyse von Küstenerosion oder zur Biomasse-Abschätzung in Wäldern eingesetzt.
- Autonome Systeme: Für autonome Fahrzeuge und Roboter sind Punktwolken die primäre Datenquelle für die Echtzeit-Umfelderfassung, Objekterkennung, Kollisionsvermeidung und Lokalisierung (SLAM - Simultaneous Localization and Mapping).
- Kulturerbe und Archäologie: Die berührungslose Digitalisierung ermöglicht die Archivierung und Analyse von fragilen historischen Artefakten und Stätten, deren virtuelle Rekonstruktion und die Zugänglichmachung für ein globales Publikum.
5. Herausforderungen und Zukunftsperspektiven: Die Rolle der Künstlichen Intelligenz
Trotz der beeindruckenden Fortschritte bleiben Herausforderungen bestehen. Das enorme Datenvolumen von Punktwolken stellt hohe Anforderungen an Speicherung und Verarbeitung. Die unstrukturierte Natur der Daten erschwert die Anwendung von Standard-Algorithmen aus der Bildverarbeitung. Die größte Herausforderung liegt jedoch in der Extraktion von semantischer Information aus den rohen Geometriedaten.
Genau hier setzt die aktuelle Forschung an, die stark von Fortschritten im Bereich des Deep Learning geprägt ist. Neuronale Netze, die speziell für die Verarbeitung von Punktwolken entwickelt wurden (z.B. PointNet, PointNet++), revolutionieren die automatische Klassifizierung und semantische Segmentierung [4]. Diese KI-gestützten Ansätze ermöglichen es, Objekte in einer Punktwolke nicht nur zu erkennen, sondern auch deren Bedeutung zu verstehen – ein entscheidender Schritt in Richtung einer vollständig autonomen Interpretation der erfassten Realität.
Zukünftige Trends deuten auf eine Fusion von multimodalen Daten (z.B. die Kombination von LiDAR, Bild- und Radardaten), die Entwicklung von Cloud-nativen Plattformen für die kollaborative Echtzeit-Verarbeitung und die Integration von Punktwolken in immersive Augmented- und Virtual-Reality-Anwendungen (AR/VR).
6. Fazit
Die Punktwolkentechnologie hat sich von einem spezialisierten Vermessungswerkzeug zu einer fundamentalen Säule der digitalen Transformation entwickelt. Sie liefert die empirische Datengrundlage für den digitalen Zwilling und schlägt eine Brücke zwischen der physischen und der digitalen Welt. Die Fähigkeit, komplexe Realitäten mit beispielloser Genauigkeit zu erfassen, zu analysieren und zu visualisieren, eröffnet neue Horizonte in Wissenschaft, Technik und Industrie. Während die technologischen Herausforderungen in der Verarbeitung großer, unstrukturierter Datenmengen nach wie vor signifikant sind, verspricht die Konvergenz von 3D-Sensorik und künstlicher Intelligenz eine Zukunft, in der die digitale Vermessung der Welt nicht nur möglich, sondern allgegenwärtig und intelligent ist.
Referenzen
[1] GDS Online. (2023). 3D Point Cloud: Understanding Technology, Workflow & Use Cases. Abgerufen von https://www.gdsonline.tech/3d-point-cloud/
[2] Liu, W., et al. (2019). Deep Learning on Point Clouds and Its Application: A Survey. Sensors, 19(19), 4188.
[3] Sheshtar, F. M., et al. (2025). Comparative Analysis of LiDAR and Photogrammetry for 3D Reconstruction of Objects. Applied Sciences, 15(3), 1085.
[4] Sarker, S., et al. (2024). A comprehensive overview of deep learning techniques for 3D point cloud processing. arXiv preprint arXiv:2405.11903.


